Daniela Rus est professeur au Laboratoire d'Informatique et d'Intelligence Artificielle du MIT (CSAIL). Le dernier travail de son équipe au MIT est une pince robotique conçue pour saisir des objets, mais dont l'apparence n'est pas conventionnelle. Visuellement, l'objet a plus l’allure d'une tulipe en caoutchouc ou d'un ballon dégonflé qu'une main de robot de science-fiction.
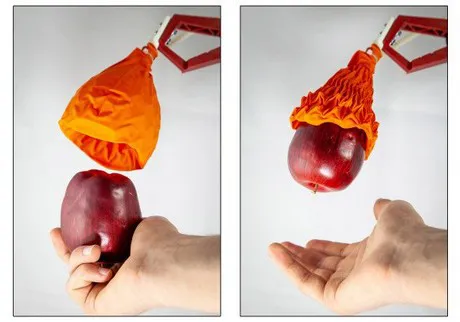 C'est ce look unique qui rend la pince si potentiellement utile. Sous sa peau de caoutchouc se trouve un squelette d'origami en forme d'étoile de mer. Au fur et à mesure que le gaz entre et sort de l’enceinte étanche de la pince, l’ensemble du dispositif s'ouvre et se ferme comme une fleur.
C'est ce look unique qui rend la pince si potentiellement utile. Sous sa peau de caoutchouc se trouve un squelette d'origami en forme d'étoile de mer. Au fur et à mesure que le gaz entre et sort de l’enceinte étanche de la pince, l’ensemble du dispositif s'ouvre et se ferme comme une fleur.
L'appareil est capable de saisir des objets délicats sans les casser, tout en conservant une prise suffisamment forte pour soulever 100 fois son propre poids. « En combinant ce squelette pliable avec un extérieur doux, nous obtenons le meilleur des résultats », a déclaré Rus à The Verge. « Je suis très enthousiaste à l'idée d'utiliser une telle main de robot dans le futur. »