L'agriculture est une industrie où les marges sont faibles et où le rapport coût-efficacité et le gain de temps sont des questions cruciales. La mise en place d'un système robotique permettrait certains avantages tels qu'une main d'œuvre plus flexible et des opérations de nuit. Les robots doivent par ailleurs être développés pour travailler dans des conditions difficiles et dans des environnements très incertains et inconnus.
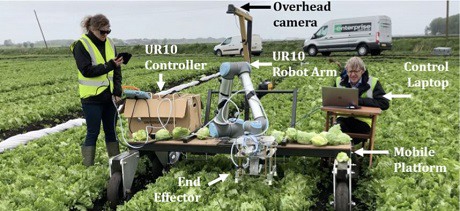
L'un des défis spécifiques consiste à effectuer des manipulations pour la récolte robotisée autonome. Des ingénieurs de l'Université de Cambridge ont mis au point un système pour automatiser la récolte de la laitue iceberg. Comparativement à d'autres produits, l'iceberg est difficile à récolter car facilement endommagée par la manipulation et est très difficile à détecter visuellement. Une plate-forme appelée Vegebot a été développée pour permettre le développement itératif et les tests sur le terrain de la solution, qui comprend un système de vision, un effecteur final personnalisé et un logiciel. Un système de vision et d'apprentissage sur mesure a été développé qui utilise deux réseaux neuronaux convolutionnels intégrés pour réaliser la classification et la localisation. Un effecteur d'extrémité sur mesure a été développé pour permettre une récolte sans dommage.
« L'objectif était d'obtenir une bonne classification, un temps de cycle comparable à celui des humains ainsi que d'éviter d'endommager les laitues récoltées. La localisation et la classification étaient raisonnablement robustes, comme en témoignent un succès de localisation de 91 % et une précision de classification de 82 % lorsqu'elles ont été testées sur un ensemble important de données d'essai. Le temps de cycle moyen sur Vegebot (31,7s) était limité par le poids de l'effecteur final et donc actuellement plus lent que les humains, mais pouvait être facilement amélioré avec des matériaux plus légers. Bien que le taux de réussite de la récolte ait été élevé (88,2 %), le taux de dommages était faible (38 %), des travaux futurs sont nécessaires pour réduire le taux de dommages ainsi qu'une optimisation supplémentaire est nécessaire pour répondre aux normes des supermarchés », ont expliqué les scientifiques.
Bien que les techniques et les approches aient été appliquées à la laitue iceberg, les concepts décrits pourraient être appliqués à d'autres situations de récolte et d'agriculture robotisée. D'autres travaux visant à étudier la possibilité d'une application plus large et à mettre au point un système de récolte plus universel auraient un impact commercial ainsi que de recherche accru.
Source : Simon Birrell, Josie Hughes, Julia Y. Cai, Fumiya Iida, « A field-tested robotic harvesting system for iceberg lettuce » (Un système de récolte robotisé testé sur le terrain pour la laitue iceberg), 2019, Journal of Field Robotics.