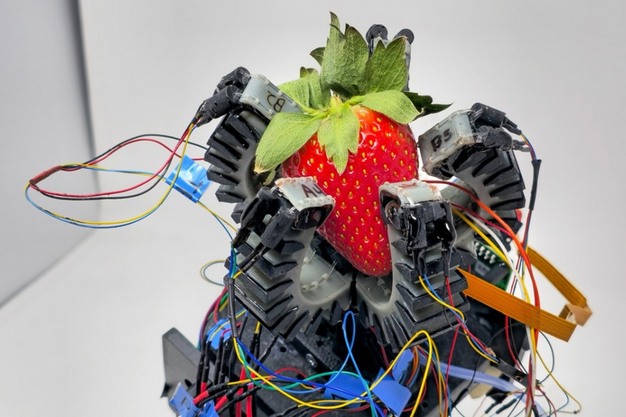
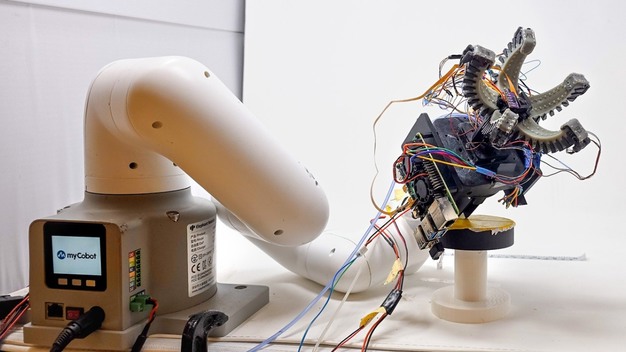
Des chercheurs de Cornell University ont mis au point une pince robotique souple capable d'évaluer la maturité des fruits par le toucher et de récolter des fraises sans les endommager. Le dispositif repose sur des capteurs à fibre optique extensibles qui mesurent la fermeté du fruit, combinés à un mouvement de torsion permettant de le détacher sans traction.
Les travaux, publiés le 23 mars dans la revue Nature Communications, ont été menés par Anand Mishra au sein du laboratoire dirigé par Rob Shepherd, professeur d'ingénierie mécanique John F. Carr. L'équipe a collaboré avec Marvin Pritts, professeur d'horticulture, afin d'adapter cette technologie à la production de petits fruits.
 © Cornell University
© Cornell University
« Ce qui est remarquable à Cornell, c'est la combinaison d'une forte expertise en agriculture et en robotique », explique Rob Shepherd. « Cela nous permet de développer des solutions innovantes à l'interface de ces deux domaines. »
La pince est équipée de deux capteurs à fibre optique mesurant à la fois la courbure et la pression. Le système peut ainsi estimer la forme du fruit et ajuster sa prise afin d'éviter tout dommage. « Les capteurs ont des propriétés mécaniques similaires à celles de la pince elle-même. C'est un peu comme si la pince "ressentait" le fruit, plutôt que d'utiliser des capteurs distincts », précise Rob Shepherd.
Le dispositif a été entraîné à partir de fraises, utilisées comme culture modèle. « La maturité des fraises peut être facilement identifiée visuellement grâce à leur couleur », explique Rob Shepherd. « Nous avons donc entraîné le système à reconnaître la maturité par le toucher, puis validé les résultats en les comparant à la couleur. Anand Mishra a ainsi pu déterminer avec précision le moment optimal de récolte en se basant sur la fermeté mesurée. »
Une fois le fruit saisi, un mécanisme à engrenage planétaire permet à la pince de pivoter pour détacher la fraise sans l'arracher. Une caméra intégrée complète le système en identifiant les fruits dissimulés sous le feuillage.
 © Cornell University
© Cornell University
Cette technologie pourrait être appliquée à d'autres cultures pour lesquelles la maturité est difficile à évaluer visuellement, comme l'avocat, l'ananas ou la papaye. « Avec la papaye, par exemple, il est difficile de savoir quand elle est mûre, et sa fenêtre de récolte est très courte », souligne Rob Shepherd.
Selon les chercheurs, ce type de robot pourrait contribuer à faire évoluer les systèmes de production en permettant une gestion plus fine des cultures, tout en réduisant la dépendance aux intrants comme les pesticides et les engrais. « Les robots nous permettront d'aller vers des pratiques qui ne sont pas économiquement viables aujourd'hui », estime Rob Shepherd. « Gérer une exploitation avec ce niveau de précision est complexe, mais ces technologies pourraient rendre cela possible. »
Pour plus d'informations :
Becka Bowyer
Université de Cornell
Tél. : +1 607 220 4185
[email protected]
www.news.cornell.edu









